
Hôm trước có nói về Endstop cho mạch CNC, nên tiếp theo chia sẻ luôn về mạch CNC Shield v3.
Board CNC Shield v3 là mạch mở rộng của mạch Arduino Uno dùng cho các máy CNC, Laser Mini. Số trục (Axis) tối đã hỗ trợ là 4 trục. Nên có thể cài đặt theo từng mục đích sử dụng.

Phần Upload Firmware sẽ không được đề cập ở bài này.
Đây là mình chia sẻ cách kết nối của mình, có thể sẽ khác so với cách kết nối có mà bạn tìm thấy ở chỗ khác, nhưng nó hoạt động với mình nên các bạn có thể tham khảo.
{getToc} $title={Table of Contents}


Bạn có 2 lựa chọn





Thì phần này sẽ nói rõ về phần cài đặt tùy chỉnh thông số này cho 2 module điều khiển phổ biến là A4988 và DRV8825.

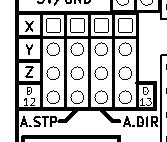
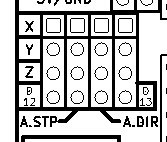
Ở giữa 2 hàng chân cắm cho Module Step Motor sẽ có các cặp chân để cài đặt thông số maximum micro step cho động cơ bước tùy theo mục đích sử dụng.



Từ các cách kết nối trên bạn sẽ có thông số maximum micro step (m), thông số này là độ chia nhỏ nhất của 1 bước mà máy có thể điều khiển.
Ví dụ các động cơ bước hay gặp thì góc bước α = 1.8°. Nếu theo bạn chỉnh m=1/8 thì bước nhỏ nhất của động cơ bước là



Nên được dùng để xác định mặt chuẩn trước khi gia công.
*Lưu ý: Nên có tụ kết nối giữa 2 chân.



Dưới đây là các mình dùng để điều khiển, để tiện cho việc thay đổi mục đích sử dụng làm làm CNC hoặc Laser
Switch để thay đổi lựa chọn tín hiệu điều khiển PWM cho Spindle hoặc Laser.
Relay để chuyển tín hiệu điều khiển bật/tắt.
Tín hiệu sau Relay có thể thể kết nối thẳng tới Spindle để chỉ điều khiển bật/tắt, hoặc có thể kết nối với Dimmer để có thể điều khiển được tốc độ cho Spindle.


 Tham khảo thêm về cách kết nối, và cách chống nhiễn cho công tắc hành trình tại đây: Mạch chống nhiễu cho Endstop - Limit Switch
Tham khảo thêm về cách kết nối, và cách chống nhiễn cho công tắc hành trình tại đây: Mạch chống nhiễu cho Endstop - Limit Switch
 Mọi thắc mắc, có thể liên hệ mình theo thông tin bên dưới.
Mọi thắc mắc, có thể liên hệ mình theo thông tin bên dưới.
Cảm ơn các bạn đã tham khảo bài chia sẻ này, mong nó sẽ có ích cho các bạn..
Nguồn tham khảo:
- Protoneer
- GRBL Wiki
Board CNC Shield v3 là mạch mở rộng của mạch Arduino Uno dùng cho các máy CNC, Laser Mini. Số trục (Axis) tối đã hỗ trợ là 4 trục. Nên có thể cài đặt theo từng mục đích sử dụng.

Phần Upload Firmware sẽ không được đề cập ở bài này.
Đây là mình chia sẻ cách kết nối của mình, có thể sẽ khác so với cách kết nối có mà bạn tìm thấy ở chỗ khác, nhưng nó hoạt động với mình nên các bạn có thể tham khảo.
{getToc} $title={Table of Contents}
Chân ra - Pinout
Pinout của Arduino Uno
Có sự khác biệt nhỏ giữa 2 chân D11 và D12 ở phiên bản GRBL v0.9 trở lên và bản cũ hơn v0.9, v0.8
Pinout của CNC Shield v3
Tổng quan
Cài đặt cho trục module trục thứ 4 - trục A
Bạn có 2 lựa chọn
- Dùng làm Clone cho 1 trong 3 trục XYZ
- Hoạt động là 1 trục thứ 4 riêng biệt - trục A

- Clone trục X

- Clone trục Y

- Clone trục Z

- Hoạt động độc lập tín hiệu điều khiển sẽ nhận từ chân D12 và D13 trên mạch Uno

Cài đặt Micro Stepping
Nếu các bạn đã xem qua bài viết Động cơ bước và cách tính bước thì các bạn có thể thấy thông số maximum micro step (m), có thể các bạn sẽ thấy lạ, không biết thông số này từ đâu ra hay chỉ là lấy bừa ra con số để tính bước.Thì phần này sẽ nói rõ về phần cài đặt tùy chỉnh thông số này cho 2 module điều khiển phổ biến là A4988 và DRV8825.

Ở giữa 2 hàng chân cắm cho Module Step Motor sẽ có các cặp chân để cài đặt thông số maximum micro step cho động cơ bước tùy theo mục đích sử dụng.

Ghi chú:
- Low - không kết nối
- High - kết nối{alertInfo}
Các tùy chỉnh cho Module A4988

Các tùy chỉnh cho Module DRV8825

Từ các cách kết nối trên bạn sẽ có thông số maximum micro step (m), thông số này là độ chia nhỏ nhất của 1 bước mà máy có thể điều khiển.
Ví dụ các động cơ bước hay gặp thì góc bước α = 1.8°. Nếu theo bạn chỉnh m=1/8 thì bước nhỏ nhất của động cơ bước là
α*m = 1.8/8 = 0.225°
vì vậy khi m càng nhỏ thì độ chỉ số bước nhỏ nhất của máy càng nhỏ, từ đó độ chính xác của máy càng cao.Phần mở rộng điều khiển Offline


Phần kết nối Bluetooth và Probe (Dò phôi)
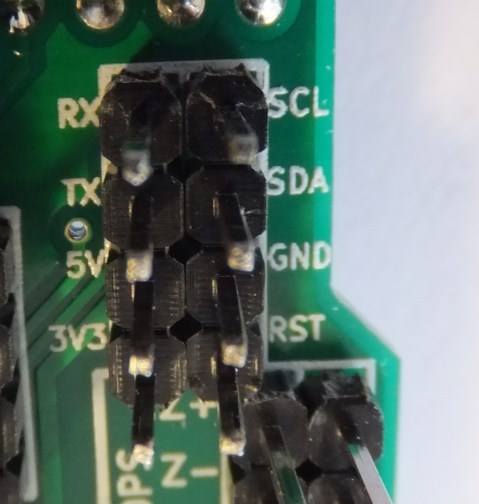
- Kết nối Bluetooth sẽ hướng dẫn riêng ở 1 bài khác, có thể tham khảo tại đây: <link>
- Kết nối Z Probe - Dò phôi
Nên được dùng để xác định mặt chuẩn trước khi gia công.
*Lưu ý: Nên có tụ kết nối giữa 2 chân.

Phần tín hiệu điều khiển Spindle hoặc Laser và Endstop - Limit Switch
Tùy theo phiên bản Firmware GRBL sử dụng sẽ có thay đổi nhỏ ở 2 chân ra cho Limit Z và PWM điều khiển Spindle (Laser)
Kết nối tín hiệu PWM cho Spindle - Laser

Dưới đây là các mình dùng để điều khiển, để tiện cho việc thay đổi mục đích sử dụng làm làm CNC hoặc Laser
Switch để thay đổi lựa chọn tín hiệu điều khiển PWM cho Spindle hoặc Laser.
Relay để chuyển tín hiệu điều khiển bật/tắt.
Tín hiệu sau Relay có thể thể kết nối thẳng tới Spindle để chỉ điều khiển bật/tắt, hoặc có thể kết nối với Dimmer để có thể điều khiển được tốc độ cho Spindle.

Kết nối Endstop - Limit Switch

Chi tiết các chân kết nối.

Nút khẩn cấp
- Abort: hủy bỏ lệnh.
- Hold: giữ vị trí.
- Resume: tạm dừng, nhấn lần nữa tiếp tục chạy.
- E-STOP: dừng máy khẩn cấp.

Cảm ơn các bạn đã tham khảo bài chia sẻ này, mong nó sẽ có ích cho các bạn..
Nguồn tham khảo:
- Protoneer
- GRBL Wiki
______________________________
Các bạn có thắc mắc, cần tư vấn thêm thì có thể liên hệ mình qua các thông tin sau:
Shopee: DIY Everything Store
Fanpage: DIY Everything - Tự làm mọi thứ
Group: Group DIY Everything - Tự làm mọi thứ
Email: [email protected]
Group: Group DIY Everything - Tự làm mọi thứ
Email: [email protected]